Robots
At the Autonomous Motion Department we have access to multiple state-of-the-art robots. We use the robots as experiemental platforms for our research (see Experimental Robotics).

Athena
Athena is a custom-built, hydraulically actuated full humanoid robot. Some of its unique features include prothetic lower legs, a relatively small mass allowing for highly dynamic motion, and its head equipped with a Velodyne sensor.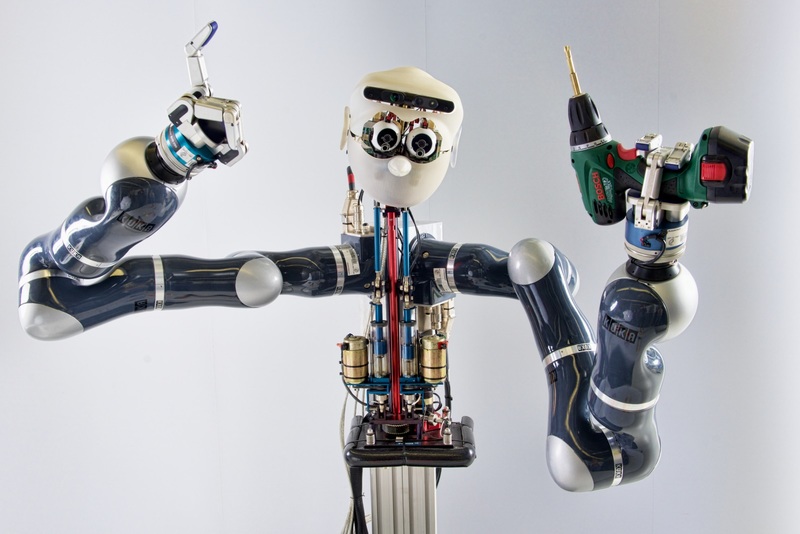
Apollo
Apollo is a dual-arm manipulation platform. The robot has two KUKA lightweight robot arms, Barrett hands, and a Sarcos head featuring different vision sensors (Photo: Wolfram Scheible).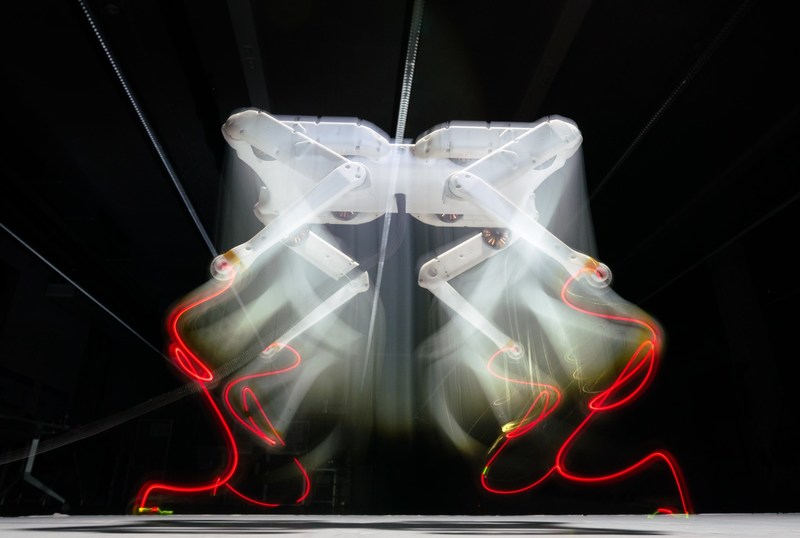
Solo
Solo is a light-weight, inexpensive, torque-controlled quadruped robot.
The robot is assembled from 8 identical actuator modules and was designed for legged locomotion research.
It’s low complexity design is open-source and consists mostly of 3d printed parts and off-the-shelf components.

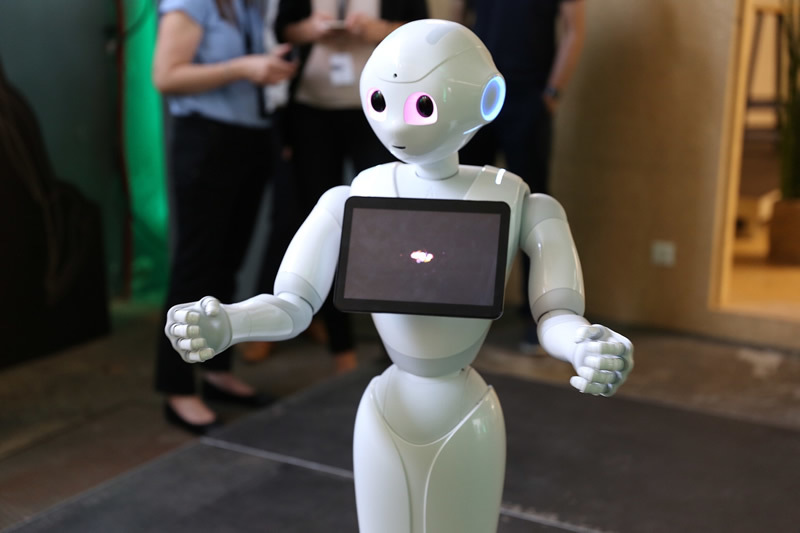
Nao
The Nao robot is a small, electrically actuated humanoid robot developed and sold by Aldebaran Robotics. It has 25 degrees of freedom, an inertial sensor, cameras, sonar rangefinders and onboard batteries.