On the relevance of grasp metrics for predicting grasp success
2017
Conference Paper
am
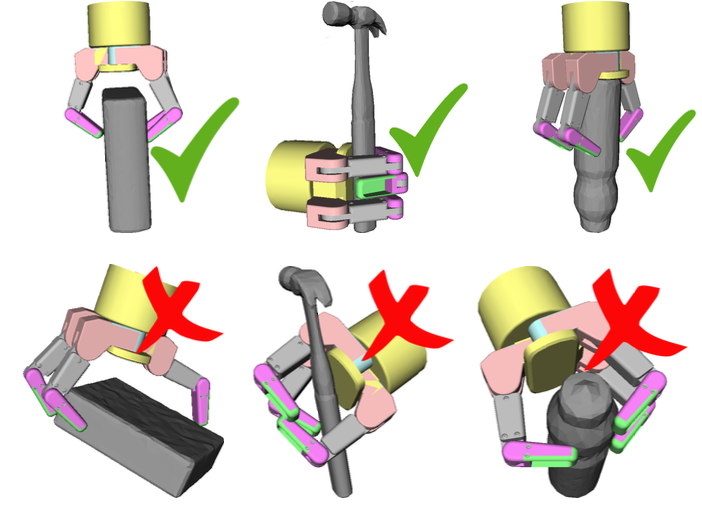
We aim to reliably predict whether a grasp on a known object is successful before it is executed in the real world. There is an entire suite of grasp metrics that has already been developed which rely on precisely known contact points between object and hand. However, it remains unclear whether and how they may be combined into a general purpose grasp stability predictor. In this paper, we analyze these questions by leveraging a large scale database of simulated grasps on a wide variety of objects. For each grasp, we compute the value of seven metrics. Each grasp is annotated by human subjects with ground truth stability labels. Given this data set, we train several classification methods to find out whether there is some underlying, non-trivial structure in the data that is difficult to model manually but can be learned. Quantitative and qualitative results show the complexity of the prediction problem. We found that a good prediction performance critically depends on using a combination of metrics as input features. Furthermore, non-parametric and non-linear classifiers best capture the structure in the data.
| Author(s): | Carlos Rubert and Daniel Kappler and Antonio Morales and Stefan Schaal and Jeannette Bohg |
| Book Title: | Proceedings of the IEEE/RSJ International Conference of Intelligent Robots and Systems |
| Year: | 2017 |
| Month: | September |
| Department(s): | Autonomous Motion |
| Research Project(s): |
Learning to Grasp from Big Data
|
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| State: | Accepted |
|
BibTex @inproceedings{2017_IROS_rkmsb,
title = {On the relevance of grasp metrics for predicting grasp success},
author = {Rubert, Carlos and Kappler, Daniel and Morales, Antonio and Schaal, Stefan and Bohg, Jeannette},
booktitle = {Proceedings of the IEEE/RSJ International Conference of Intelligent Robots and Systems},
month = sep,
year = {2017},
doi = {},
month_numeric = {9}
}
|
|