Accurate Vision-based Manipulation through Contact Reasoning
2020
Conference Paper
am
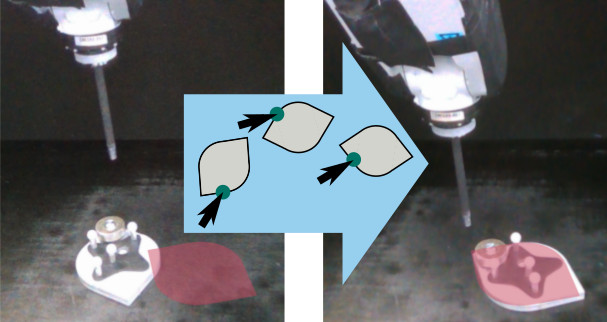
Planning contact interactions is one of the core challenges of many robotic tasks. Optimizing contact locations while taking dynamics into account is computationally costly and in only partially observed environments, executing contact-based tasks often suffers from low accuracy. We present an approach that addresses these two challenges for the problem of vision-based manipulation. First, we propose to disentangle contact from motion optimization. Thereby, we improve planning efficiency by focusing computation on promising contact locations. Second, we use a hybrid approach for perception and state estimation that combines neural networks with a physically meaningful state representation. In simulation and real-world experiments on the task of planar pushing, we show that our method is more efficient and achieves a higher manipulation accuracy than previous vision-based approaches.
| Author(s): | Alina Kloss and Maria Bauza and Jiajun Wu and Joshua B. Tenenbaum and Alberto Rodriguez and Jeannette Bohg |
| Year: | 2020 |
| Month: | May |
| Department(s): | Autonomous Motion |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| Event Name: | International Conference on Robotics and Automation |
| Event Place: | Paris |
| State: | Accepted |
| Supplement: | https://youtu.be/YLnXLHWTA60 |
| URL: | https://arxiv.org/abs/1911.03112 |
| Additional (custom) Fields: | |
| Links: |
Video
|
| Video: | |
|
BibTex @inproceedings{kloss_icra2020,
title = {Accurate Vision-based Manipulation through Contact Reasoning},
author = {Kloss, Alina and Bauza, Maria and Wu, Jiajun and Tenenbaum, Joshua B. and Rodriguez, Alberto and Bohg, Jeannette},
month = may,
year = {2020},
doi = {},
url = {https://arxiv.org/abs/1911.03112},
month_numeric = {5}
}
|
|