Online Learning of a Memory for Learning Rates
2018
Conference Paper
am
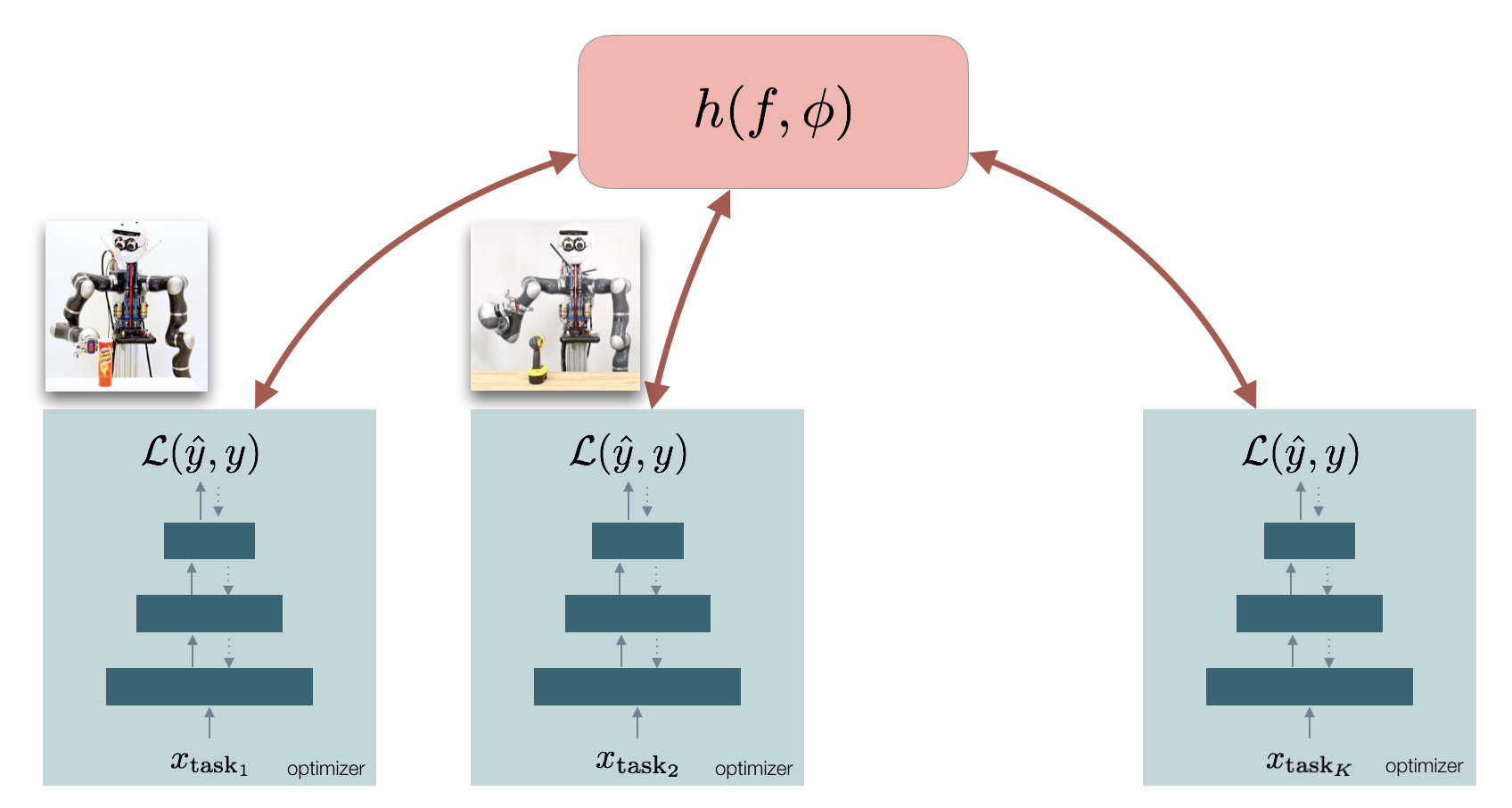
The promise of learning to learn for robotics rests on the hope that by extracting some information about the learning process itself we can speed up subsequent similar learning tasks. Here, we introduce a computationally efficient online meta-learning algorithm that builds and optimizes a memory model of the optimal learning rate landscape from previously observed gradient behaviors. While performing task specific optimization, this memory of learning rates predicts how to scale currently observed gradients. After applying the gradient scaling our meta-learner updates its internal memory based on the observed effect its prediction had. Our meta-learner can be combined with any gradient-based optimizer, learns on the fly and can be transferred to new optimization tasks. In our evaluations we show that our meta-learning algorithm speeds up learning of MNIST classification and a variety of learning control tasks, either in batch or online learning settings.
| Award: | (nominated for best paper award) |
| Author(s): | Franziska Meier and Daniel Kappler and Stefan Schaal |
| Book Title: | Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018 |
| Year: | 2018 |
| Month: | May |
| Publisher: | IEEE |
| Department(s): | Autonomous Motion |
| Bibtex Type: | Conference Paper (inproceedings) |
| Paper Type: | Conference |
| Event Name: | International Conference on Robotics and Automation |
| Event Place: | Brisbane, Australia |
| Award Paper: | nominated for best paper award |
| Note: | accepted |
| Links: |
pdf
video code |
| Video: | |
|
BibTex @inproceedings{meta_icra2018,
title = {Online Learning of a Memory for Learning Rates},
author = {Meier, Franziska and Kappler, Daniel and Schaal, Stefan},
booktitle = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2018},
publisher = {IEEE},
month = may,
year = {2018},
note = {accepted},
doi = {},
month_numeric = {5}
}
|
|