
2016
Oh, Y., Sutanto, G., Mistry, M., Schweighofer, N., Schaal, S.
Distinct adaptation to abrupt and gradual torque perturbations with a multi-joint exoskeleton robot
Abstracts of Neural Control of Movement Conference (NCM 2016), Montego Bay, Jamaica, April 2016 (poster)
2015
Doerr, A.
Policy Search for Imitation Learning
University of Stuttgart, January 2015 (thesis)
2014
Kalakrishnan, M.
Learning objective functions for autonomous motion generation
University of Southern California, University of Southern California, Los Angeles, CA, 2014 (phdthesis)
Pastor, P.
Data-driven autonomous manipulation
University of Southern California, University of Southern California, Los Angeles, CA, 2014 (phdthesis)
2013
Trimpe, S.
Distributed and Event-based State Estimation and Control
ETH Zurich, 2013 (phdthesis)
2011
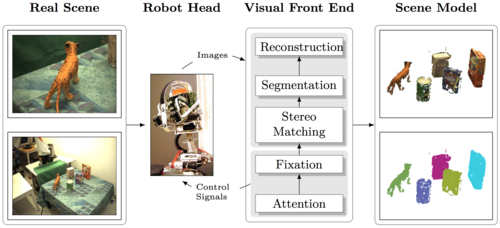
Bohg, J.
Multi-Modal Scene Understanding for Robotic Grasping
(2011:17):vi, 194, Trita-CSC-A, KTH Royal Institute of Technology, KTH, Computer Vision and Active Perception, CVAP, Centre for Autonomous Systems, CAS, KTH, Centre for Autonomous Systems, CAS, December 2011 (phdthesis)
Theodorou, E. A.
Iterative path integral stochastic optimal control: Theory and applications to motor control
University of Southern California, University of Southern California, Los Angeles, CA, 2011 (phdthesis)
2009
Ting, J.
Bayesian Methods for Autonomous Learning Systems (Phd Thesis)
Department of Computer Science, University of Southern California, Los Angeles, CA, 2009, clmc (phdthesis)
2007
Peters, J.
Machine Learning of Motor Skills for Robotics
University of Southern California, Los Angeles, CA, USA, University of Southern California, Los Angeles, CA, USA, 2007, clmc (phdthesis)
2006
Berenz, V., Tillier, F., Barbosa, F., Boryeu, M., Horvath, D., Froloff, N.
Molecular Modeling for the BioPrint Pharmaco-informatics Platform
2006 (poster)
2004
D’Souza, A
Towards Tractable Parameter-Free Statistical Learning (Phd Thesis)
Department of Computer Science, University of Southern California, Los Angeles, 2004, clmc (phdthesis)