
2016
Oh, Y., Sutanto, G., Mistry, M., Schweighofer, N., Schaal, S.
Distinct adaptation to abrupt and gradual torque perturbations with a multi-joint exoskeleton robot
Abstracts of Neural Control of Movement Conference (NCM 2016), Montego Bay, Jamaica, April 2016 (poster)
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
2015
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
Marco, A.
Gaussian Process Optimization for Self-Tuning Control
Polytechnic University of Catalonia (BarcelonaTech), October 2015 (mastersthesis)
Doerr, A.
Adaptive and Learning Concepts in Hydraulic Force Control
University of Stuttgart, September 2015 (mastersthesis)
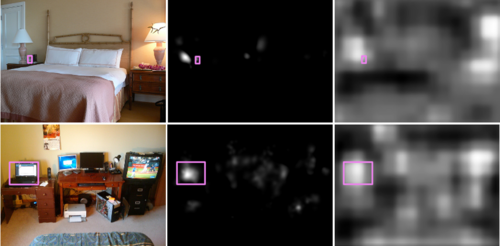
Kloss, A.
Object Detection Using Deep Learning - Learning where to search using visual attention
Eberhard Karls Universität Tübingen, May 2015 (mastersthesis)
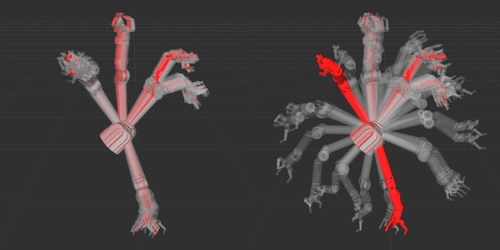
Widmaier, F.
Robot Arm Tracking with Random Decision Forests
Eberhard-Karls-Universität Tübingen, May 2015 (mastersthesis)
2014
Holger Kaden
Pole Balancing with Apollo
Eberhard Karls Universität Tübingen, December 2014 (mastersthesis)
Rai, A.
Learning Coupling Terms for Obstacle Avoidance
École polytechnique fédérale de Lausanne, August 2014 (mastersthesis)
Issac, J.
Object Tracking in Depth Images Using Sigma Point Kalman Filters
Karlsruhe Institute of Technology, July 2014 (mastersthesis)
Pfreundt, C.
Probabilistic Object Tracking on the GPU
Karlsruhe Institute of Technology, March 2014 (mastersthesis)
2013
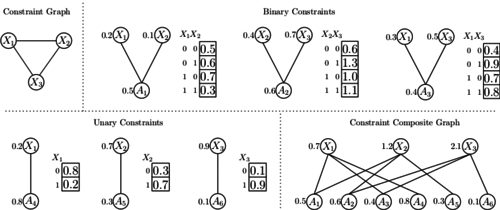
Sankaran, B., Ghazvininejad, M., He, X., Kale, D., Cohen, L.
Learning and Optimization with Submodular Functions
ArXiv, May 2013 (techreport)
2011
Herzog, A.
Learning of grasp selection based on shape-templates
Karlsruhe Institute of Technology, 2011 (mastersthesis)
2009
Schaal, S.
The SL simulation and real-time control software package
University of Southern California, Los Angeles, CA, 2009, clmc (techreport)
Schaal, S.
The SL simulation and real-time control software package
University of Southern California, Los Angeles, CA, 2009, clmc (techreport)
2007
Peters, J.
Relative Entropy Policy Search
CLMC Technical Report: TR-CLMC-2007-2, Computational Learning and Motor Control Lab, Los Angeles, CA, 2007, clmc (techreport)
Ting, J., Theodorou, E., Schaal, S.
Learning an Outlier-Robust Kalman Filter
CLMC Technical Report: TR-CLMC-2007-1, Los Angeles, CA, 2007, clmc (techreport)
2006
Theodorou, E.
Statistical Learning of LQG controllers
Technical Report-2006-1, Computational Action and Vision Lab University of Minnesota, 2006, clmc (techreport)
2005
Theodorou, E.
Linear and Nonlinear Estimation models applied to Hemodynamic Model
Technical Report-2005-1, Computational Action and Vision Lab University of Minnesota, 2005, clmc (techreport)