2020
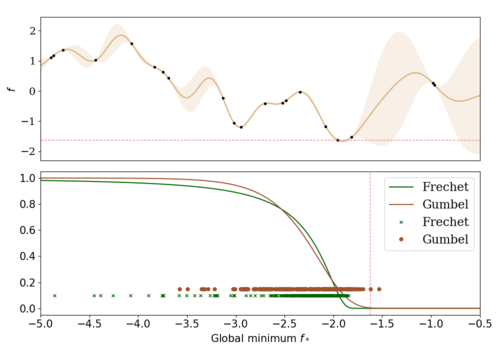
Marco, A., Rohr, A. V., Baumann, D., Hernández-Lobato, J. M., Trimpe, S.
Excursion Search for Constrained Bayesian Optimization under a Limited Budget of Failures
2020 (proceedings) In revision

2017
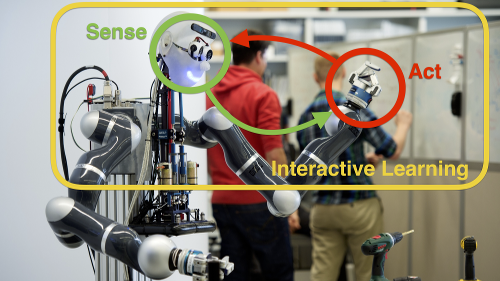
Peters, J., Lee, D., Kober, J., Nguyen-Tuong, D., Bagnell, J., Schaal, S.
Robot Learning
In Springer Handbook of Robotics, pages: 357-394, 15, 2nd, (Editors: Siciliano, Bruno and Khatib, Oussama), Springer International Publishing, 2017 (inbook)

2016
Dominey, P. F., Prescott, T. J., Bohg, J., Engel, A. K., Gallagher, S., Heed, T., Hoffmann, M., Knoblich, G., Prinz, W., Schwartz, A.
Implications of Action-Oriented Paradigm Shifts in Cognitive Science
In The Pragmatic Turn - Toward Action-Oriented Views in Cognitive Science, 18, pages: 333-356, 20, Strüngmann Forum Reports, vol. 18, J. Lupp, series editor, (Editors: Andreas K. Engel and Karl J. Friston and Danica Kragic), The MIT Press, 18th Ernst Strüngmann Forum, May 2016 (incollection) In press
Bohg, J., Kragic, D.
Learning Action-Perception Cycles in Robotics: A Question of Representations and Embodiment
In The Pragmatic Turn - Toward Action-Oriented Views in Cognitive Science, 18, pages: 309-320, 18, Strüngmann Forum Reports, vol. 18, J. Lupp, series editor, (Editors: Andreas K. Engel and Karl J. Friston and Danica Kragic), The MIT Press, 18th Ernst Strüngmann Forum, May 2016 (incollection) In press
Oh, Y., Sutanto, G., Mistry, M., Schweighofer, N., Schaal, S.
Distinct adaptation to abrupt and gradual torque perturbations with a multi-joint exoskeleton robot
Abstracts of Neural Control of Movement Conference (NCM 2016), Montego Bay, Jamaica, April 2016 (poster)
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
Ting, J., Meier, F., Vijayakumar, S., Schaal, S.
Locally Weighted Regression for Control
In Encyclopedia of Machine Learning and Data Mining, pages: 1-14, Springer US, Boston, MA, 2016 (inbook)
2015
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
Marco, A.
Gaussian Process Optimization for Self-Tuning Control
Polytechnic University of Catalonia (BarcelonaTech), October 2015 (mastersthesis)
Doerr, A.
Adaptive and Learning Concepts in Hydraulic Force Control
University of Stuttgart, September 2015 (mastersthesis)
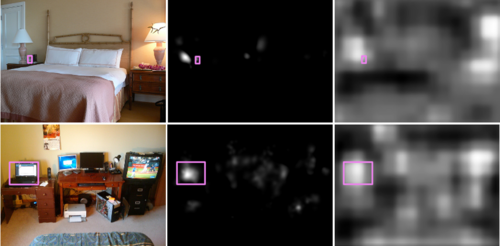
Kloss, A.
Object Detection Using Deep Learning - Learning where to search using visual attention
Eberhard Karls Universität Tübingen, May 2015 (mastersthesis)
Widmaier, F.
Robot Arm Tracking with Random Decision Forests
Eberhard-Karls-Universität Tübingen, May 2015 (mastersthesis)
Trimpe, S.
Lernende Roboter
In Jahrbuch der Max-Planck-Gesellschaft, Max Planck Society, May 2015, (popular science article in German) (inbook)
Schaal, S.
Autonomous Robots
In Jahrbuch der Max-Planck-Gesellschaft, May 2015 (incollection)
Doerr, A.
Policy Search for Imitation Learning
University of Stuttgart, January 2015 (thesis)
Berenz, V., Alnajjar, F., Hayashibe, M., Shimoda, S.
Tacit Learning for Emergence of Task-Related Behaviour through Signal Accumulation
In Emergent Trends in Robotics and Intelligent Systems: Where is the Role of Intelligent Technologies in the Next Generation of Robots?, pages: 31-38, Springer International Publishing, Cham, 2015 (inbook)
Peters, J., Lee, D., Kober, J., Nguyen-Tuong, D., Bagnell, J. A., Schaal, S.
Robot Learning
In Springer Handbook of Robotics 2nd Edition, pages: 1371-1394, Springer Berlin Heidelberg, Berlin, Heidelberg, 2015 (incollection)
2014
Holger Kaden
Pole Balancing with Apollo
Eberhard Karls Universität Tübingen, December 2014 (mastersthesis)
Rai, A.
Learning Coupling Terms for Obstacle Avoidance
École polytechnique fédérale de Lausanne, August 2014 (mastersthesis)
Issac, J.
Object Tracking in Depth Images Using Sigma Point Kalman Filters
Karlsruhe Institute of Technology, July 2014 (mastersthesis)
Pfreundt, C.
Probabilistic Object Tracking on the GPU
Karlsruhe Institute of Technology, March 2014 (mastersthesis)
Kalakrishnan, M.
Learning objective functions for autonomous motion generation
University of Southern California, University of Southern California, Los Angeles, CA, 2014 (phdthesis)
Alnajjar, F. S., Berenz, V., Ken-ichi, O., Ohno, K., Yamada, H., Kondo, I., Shimoda, S.
Muscle Synergy Features in Behavior Adaptation and Recovery
In Replace, Repair, Restore, Relieve – Bridging Clinical and Engineering Solutions in Neurorehabilitation: Proceedings of the 2nd International Conference on NeuroRehabilitation (ICNR2014), Aalborg, 24-26 June, 2014, pages: 245-253, Springer International Publishing, Cham, 2014 (inbook)
Pastor, P.
Data-driven autonomous manipulation
University of Southern California, University of Southern California, Los Angeles, CA, 2014 (phdthesis)
2013
Sankaran, B., Ghazvininejad, M., He, X., Kale, D., Cohen, L.
Learning and Optimization with Submodular Functions
ArXiv, May 2013 (techreport)
Trimpe, S.
Distributed and Event-based State Estimation and Control
ETH Zurich, 2013 (phdthesis)
Righetti, L., Buchli, J., Mistry, M., Kalakrishnan, M., Schaal, S.
Using Torque Redundancy to Optimize Contact Forces in Legged Robots
In Redundancy in Robot Manipulators and Multi-Robot Systems, 57, pages: 35-51, Lecture Notes in Electrical Engineering, Springer Berlin Heidelberg, 2013 (incollection)
2012
2011
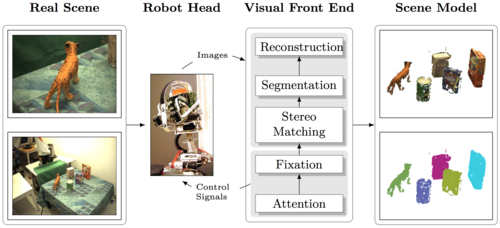
Bohg, J.
Multi-Modal Scene Understanding for Robotic Grasping
(2011:17):vi, 194, Trita-CSC-A, KTH Royal Institute of Technology, KTH, Computer Vision and Active Perception, CVAP, Centre for Autonomous Systems, CAS, KTH, Centre for Autonomous Systems, CAS, December 2011 (phdthesis)
Theodorou, E. A.
Iterative path integral stochastic optimal control: Theory and applications to motor control
University of Southern California, University of Southern California, Los Angeles, CA, 2011 (phdthesis)
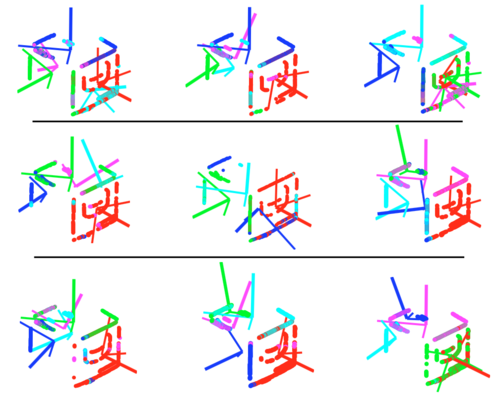
Herzog, A.
Learning of grasp selection based on shape-templates
Karlsruhe Institute of Technology, 2011 (mastersthesis)
2010
Ting, J., Vijayakumar, S., Schaal, S.
Locally weighted regression for control
In Encyclopedia of Machine Learning, pages: 613-624, (Editors: Sammut, C.;Webb, G. I.), Springer, 2010, clmc (inbook)
2009
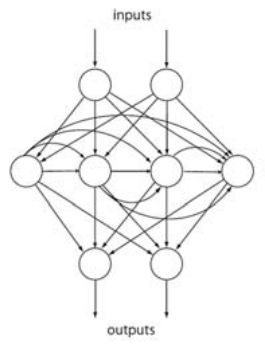
Berenz, V., Suzuki, K.
Synchronized Oriented Mutations Algorithm for Training Neural Controllers
In Advances in Neuro-Information Processing: 15th International Conference, ICONIP 2008, Auckland, New Zealand, November 25-28, 2008, Revised Selected Papers, Part II, pages: 244-251, Springer Berlin Heidelberg, Berlin, Heidelberg, 2009 (inbook)
Bergström, N., Bohg, J., Kragic, D.
Integration of Visual Cues for Robotic Grasping
In Computer Vision Systems, 5815, pages: 245-254, Lecture Notes in Computer Science, Springer Berlin Heidelberg, 2009 (incollection)
Ting, J.
Bayesian Methods for Autonomous Learning Systems (Phd Thesis)
Department of Computer Science, University of Southern California, Los Angeles, CA, 2009, clmc (phdthesis)
Schaal, S.
The SL simulation and real-time control software package
University of Southern California, Los Angeles, CA, 2009, clmc (techreport)
Schaal, S.
The SL simulation and real-time control software package
University of Southern California, Los Angeles, CA, 2009, clmc (techreport)
2008
Tevatia, G., Schaal, S.
Efficient inverse kinematics algorithms for highdimensional movement systems
CLMC Technical Report: TR-CLMC-2008-1, 2008, clmc (techreport)
Eich, M., Grimminger, F., Kirchner, F.
Adaptive stair-climbing behaviour with a hybrid legged-wheeled robot
In Advances In Mobile Robotics, pages: 768-775, World Scientific, August 2008 (incollection)
2007
Peters, J.
Machine Learning of Motor Skills for Robotics
University of Southern California, Los Angeles, CA, USA, University of Southern California, Los Angeles, CA, USA, 2007, clmc (phdthesis)
Peters, J.
Relative Entropy Policy Search
CLMC Technical Report: TR-CLMC-2007-2, Computational Learning and Motor Control Lab, Los Angeles, CA, 2007, clmc (techreport)
Schaal, S, Mohajerian, P., Ijspeert, A.
Dynamics systems vs. optimal control ? a unifying view
In Progress in Brain Research, (165):425-445, 2007, clmc (inbook)
Ting, J., Theodorou, E., Schaal, S.
Learning an Outlier-Robust Kalman Filter
CLMC Technical Report: TR-CLMC-2007-1, Los Angeles, CA, 2007, clmc (techreport)
2006
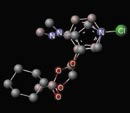
Berenz, V., Tillier, F., Barbosa, F., Boryeu, M., Horvath, D., Froloff, N.
Molecular Modeling for the BioPrint Pharmaco-informatics Platform
2006 (poster)
Theodorou, E.
Statistical Learning of LQG controllers
Technical Report-2006-1, Computational Action and Vision Lab University of Minnesota, 2006, clmc (techreport)
Vijayakumar, S., DSouza, A., Schaal, S.
Approximate nearest neighbor regression in very high dimensions
In Nearest-Neighbor Methods in Learning and Vision, pages: 103-142, (Editors: Shakhnarovich, G.;Darrell, T.;Indyk, P.), Cambridge, MA: MIT Press, 2006, clmc (inbook)
2005
Theodorou, E.
Linear and Nonlinear Estimation models applied to Hemodynamic Model
Technical Report-2005-1, Computational Action and Vision Lab University of Minnesota, 2005, clmc (techreport)
2004
D’Souza, A
Towards Tractable Parameter-Free Statistical Learning (Phd Thesis)
Department of Computer Science, University of Southern California, Los Angeles, 2004, clmc (phdthesis)
Schaal, S., Ijspeert, A., Billard, A.
Computational approaches to motor learning by imitation
In The Neuroscience of Social Interaction, (1431):199-218, (Editors: Frith, C. D.;Wolpert, D.), Oxford University Press, Oxford, 2004, clmc (inbook)