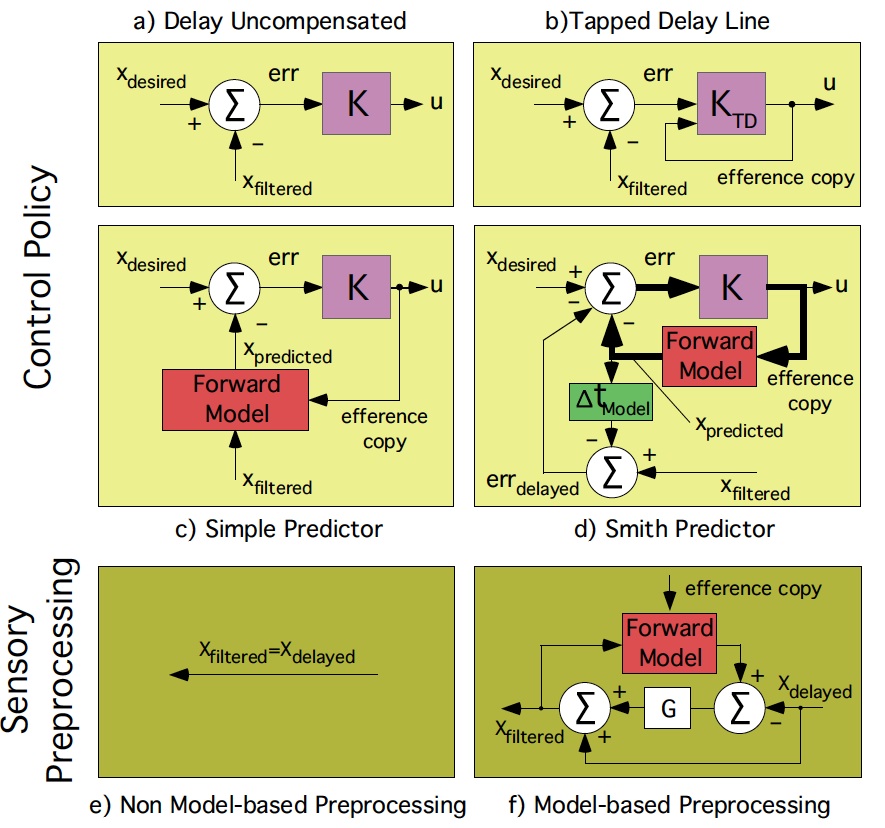
Figure 7.7: Theoretical predictions of how delays in motor control can be compensated for. The different control policies and sensory preprocessing policies make different predications about achievable delays and robustness of control. These predications can be examined in an appropriate behavioral experiment, which was the task of balancing an inverted pendulum on a finger tip in this case. More details are in Mehta, B. and Schaal, S., 2002. Forward models in visuomotor control. Journal of Neurophysiology, 88(2), pp.942-953.
Given that humans are the living example that robust and intelligent preceptuo-motor behaviors can be realized at an amazing level of performance, it has always been a most interesting research topic to investigate principles of perceptuo-motor control in human an non-human primates. The Autonomous Motion Department is in the process of setting up a research group that will focus on examining neural and behavioral principles of the control of movement. In our research, we draw inspiration from the Theory-Algorithms-Implementation distinction, as advocated by David Marr. Rather than conducting experiments and looking for discovering principles in the collected data, we will approach neuromotor control from a theory driven direction. Here, a particular phenomenon is first examined from a theoretical and algorithmic point of view to enumerate different possibilities of how a particular task can be accomplished. Second, experiments are performed that allow distinguishing between the different hypotheses, using theoretical predictions of the different hypotheses. Afterwards, details of implemenation can be examined, either in biological systems or robotic systems. We have followed this approach in various previous projects – Figure 7.7 show an example of examining how humans can overcome significant delays in their information processing, without creating instabilities in control. The Research Projects of this report will also detail an experiment of human reinforcement learning that follows the same paradigm.
For our work, we will generate a general virtual reality movement recording setup that also provides force feedback. Figure 7.8 shows such a system created by the DLR Labs in Germany, which we will adjust for our purposes. This systems allows generic virtual reality setups, uses two robot arms for force feedback, and tracks both the human body and the head with an external Vicon motion capture systems. With this generic experimental setup, we will address topics of supervised learning, reinforcement learning, movement primitives, generalization of movement, etc., in human neuromotor control. Appropriate experiments can be taken into an fMRI scanner, which is readily available in the MRZ Department of the MPI for Biological Cybermetics.
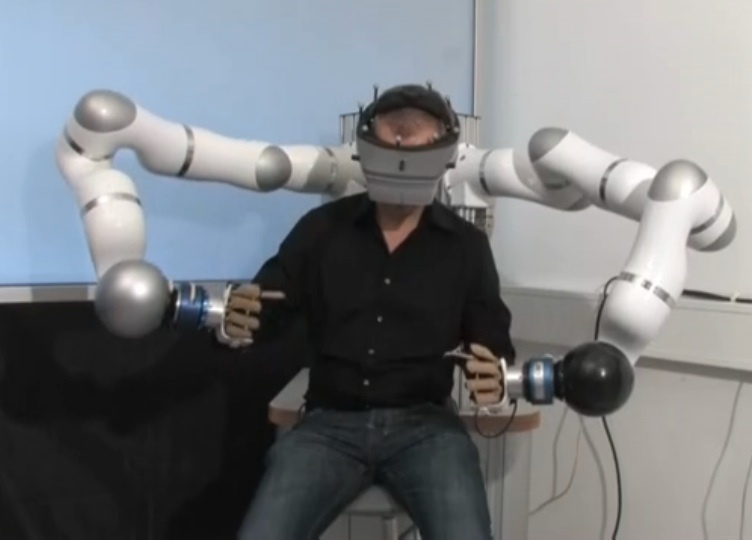
Figure 7.8: Virtual reality setup of the DLR Labortories in Germany. A similar setup is planned for the Autonomous Motion Department to realized behavioral experiments with human subjects.