
The Intelligent Control Systems group is part of the Autonomous Motion Department at the Max Planck Institute for Intelligent Systems.
Research in the Intelligent Control Systems group focuses on decision making, control, and learning for autonomous intelligent systems. We seek to develop fundamental methods and algorithms that enable robots and other intelligent systems to interact with their environment through feedback, autonomously learn from data, and interconnect with each other to form collaborative networks. Turning mathematical and theoretical insight into enhanced autonomy and performance of real-world physical systems is an important and driving facet of our work.
Research keywords: Control Dynamic systems Machine learning Networks Cyber-physical systems Robotics
News
- Jan 18: We are organizing the Second Max Planck ETH Workshop on Learning Control, taking place Feb 8/9 at ETH Zurich.
- Jan 18: Friedrich's paper on Event-triggered learning was accepted at the American Control Conference 2018, (preprint coming soon).
- Nov 17: Friedrich Solowjow has joined our group as a PhD student. Welcome!
- Sep 17: Andreas' paper on Optimizing Long-term Predictions for Model-based Policy Search got accepted at the 1st Annual Conference on Robot Learning, (CoRL17). This is collaborative work with Bosch Center for AI, Renningen and the University of Stuttgart.
- Sep 17: Sebastian is an invited speaker at the VDI (Association of German Engineers) Conference on Humanoid Robots 2017. Sebastian will talk on Learning Control in Robotics on Dec 5.
- Jul 17: Our proposal for an Invited Session on Learning-based Control was accepted at the 2017 IEEE Conference on Decision and Control. Moreover, our paper on LQR kernels was also accepted for this session (CDC17). See you in Melbourne!
- Jul 17: Paper on Distributed Event-based State Estimation accepted at IEEE Transactions on Automatic Control. (preprint)
- Jun 17: Cédric de Crousaz, former Master student in our group, has received the ETH Medal 2017 for his excellent master thesis. Congratulations, Cédric!
- May 17: Sebastian has been invited as a speaker and panelist in two panel session on control education and outreach activities during the 20th IFAC World Congress.
- Apr 17: We have moved into the new institute building. Our new home is in Spemannstrasse 34, North wing, 2nd floor.
- Jan 17: Two journal articles from our group have recently been accepted: IET Control Theory and IJRR.
- Jan 17: Andreas' and Alonso's papers got accepted at ICRA 2017 (preprints: ICRA17a, ICRA17b).
- Jan 17: Dominik Baumann has joined our group as a PhD student. Welcome!
- Dec 16: Sebastian will be giving two guest lectures on Jan 23 and 26 within the course Statistical Learning and Stochastic Control at the University of Stuttgart.
- Sep 16: Sebastian is giving a tutorial on Distributed and Event-based State Estimation at IEEE MFI 2016.
- Jul 16: We are organizing an invited session on Learning-based Control at CDC 2016 in December (together with Melanie Zeilinger and Angela Schoellig).
- Jul 16: Sebastian's paper on a novel triggering concept in state estimation was accepted at CDC 2016.
- Jun 16: We will soon start a new project on Event-based Wireless Control for Cyber-physical Systems. Our research proposal in collaboration with Marco Zimmerling (TU Dresden) within the DFG Priority Program Cyber-physical Networking was accepted. Within this project, we have an opening for a PhD researcher at MPI Tuebingen (PhD opening).
- Jun 16: Simon Ebner, former Master student in our group, was a Finalist for the Best Student Paper Award at WODES 2016. His paper Communication Rate Analysis for Event-based State Estimation was seleted as one of the four finalist. Congratulations, Simon!
- Mar 16: Together with Christos G. Cassandras, Sebastian is organizing an Invited Session on Event-Driven Control, Estimation, and Optimization at WODES 2016. Simon's paper was accepted at the same venue.
- Mar 16: Sebastian has been appointed as a new Associated Member of the Max Planck ETH Center for Learning Systems.
- Feb 16: An article about the robotics research at the Autonomous Motion Department, including our work on learning control, was published in the Max Planck Research magazine. (German, English)
- Jan 16: We had two papers accepted at ICRA 2016 and one at ACC 2016. (ACC16, ICRA16a, ICRA16b)
- Nov 15: Together with colleagues from MPI and ETH Zurich, we are hosting the First Max Planck ETH Workshop on Learning Control from Nov 11-13 in Tübingen.
- Jun 15: Together with Joris Sijs (TNO Netherlands), Sebastian organizes a Special Session on Event-based State Estimation at EBCCSP 2015 in Krakow, Poland.
- Apr 15: We had two papers accepted at EBCCSP 2015, and one at RSS 2015. (EBCCSP15a, EBCCSP15b, RSS15)
- Jan 15: Our papers at ICRA 2015 and ACC 2015 were accepted. (ICRA15, ACC15)
- Nov 14: We have received funding for our project Bayesian Optimization for Automatic Controller Design in collaboration with Philipp Hennig through a Max Planck Grassroots grant.
- Oct 14: Sebastian received the Klaus Tschira Award for achievements in public understanding of science (link) in the category of Computer Science (Informatik).
Learning Control
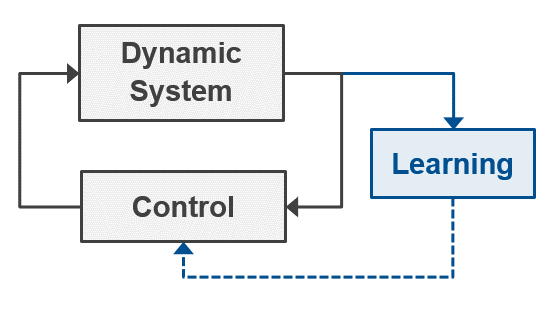
By combining dynamic systems and control theory with statistical and machine learning, we develop methods for automatic control design with limited a-priori knowledge, data-efficient reinforcement learning, and online adaptation of control systems. We believe that the combination of feedback and learning is essential to enable autonomous behavior in future (artifical) intelligent systems.
Event-based Estimation and Control
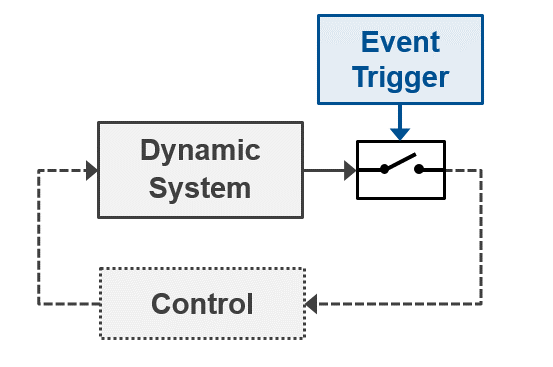
In almost all control systems today, data is sent and processed periodically. The periodic paradigm involves an inherent limitation: computation and data transmission happens at predetermined time instants, irrespective of the current state of the system or the information content of the data. Hence, hardware resources are used regardless of whether there is any need for control or estimation, which becomes prohibitive when communication and computational resources are limited such as in embedded or cyber-physical systems. We develop fundamentally new event-based sampling concepts for state estimation and control that achieve high-performance control while, at the same time, saving resources such as communication, computation, and energy.

Distributed and Networked Control
Modern communication technology allows intelligent systems to interconnect and share information with each other in order to increase collective knowledge or take collaborative action. We develop architectures and algorithms for distributed control and learning in multi-agent dynamic networks.

Bayesian State Estimation
Probability theory and Bayesian inference provide the theoretical underpinnings for filtering and state estimation algorithms used in almost all modern control systems. In our research, we have developed novel interpretations of commonly used Gaussian filters, which allow for improved filtering performance for many nonlinear problems, while maintaining the Gaussian filter's favorable computational complexity.
Applications to Robotics and Mechatronic Systems
Experiments with physical hardware such as robotic and mechatronic systems are an essential part of our research because they necessitate the consideration of all practical aspects of a complex system, they allow us to verify assumptions made in the theoretical derivations, and they reinforce and influence our theoretical research.
The videos below highlight some of our research. See 'Research Areas', 'Projects', and 'Publications' tabs for more information on the research in the Intelligent Control Systems group.
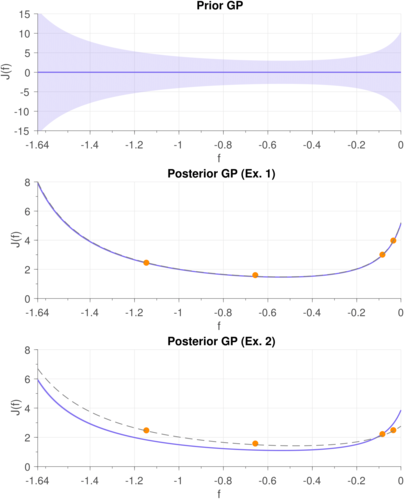
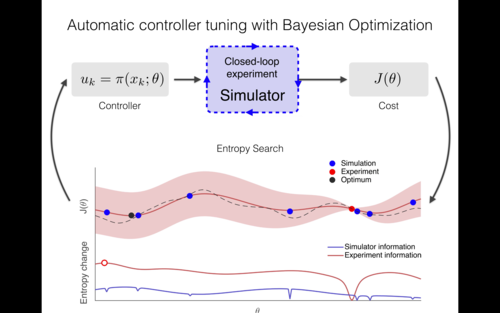
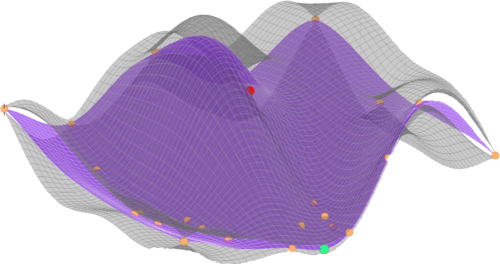
Bayesian optimization for controller learning
This video demonstrates the Automatic LQR Tuning algorithm for learning of multivariate feedback controllers from experiments. The algorithm leverages optimal control and Bayesian optimization for data-efficient learning. Relevant publication: \cite{marco_ICRA_2016}
Balancing Cube: A unique testbed for distributed control
The Balancing Cube is a dynamic sculpture that can balance autonomously on any one of its edges or corners. With six agents (the rotating arms) coordinating their actions to keep the structure in balance, the cube is a unique testbed for distributed state estimation and control. Relevant publications: \cite{trimpeCSM12,TrDAn11}
Student projects
We offer student projects in our research group both on Bachelor and Master level, as well as research internships at the PhD level.
We are always looking for excellent, motivated students to join our team. If you are interested in working with us, feel free to contact Sebastian Trimpe directly. Please include your CV and a short research statement relating to our work. Specific student projects and job openings are sometimes posted at the department website, but you may also contact us without any such opening.
University lecturing and tutorials
Lectures and tutorials held by Sebastian Trimpe:
- Statistical Learning and Stochastic Control, graduate-level lecture, University of Stuttgart, Winter semester 2017/18 (lecturer with C. Ebenbauer and N. Radde)
- Statistical Learning and Stochastic Control, graduate-level lecture, University of Stuttgart, Jan/Feb 2017 (guest lecturer)
- Introduction to Distributed Event-based State Estimation, invited tutorial, IEEE MFI conference, Baden-Baden, Sep. 2016.
- Recursive Estimation, gradulate-level lecture, ETH Zurich in Spring 2013 (responsible lecturer)
Public speaking
We are regularly invited to present our research to the general public. Some of our latest speaking engagements include:
- Max Planck Institutes Tuebingen, Open House (Tag der offenen Tür), public lecture, July 2016.
- Tech Open Air - An Interdisciplinary Technology Festival, Berlin, Germany, July 2015.
- Several workshop for high school students and teachers on "Feedback control": for example, Boston, USA, Jul. 2016; Los Angeles, USA, Dec. 2014; Cape Town, South Africa, Aug. 2014.
Public exhibitions
Exhibitions of the Balancing Cube (with Raffaello D'Andrea):
- European Control Conference, Zurich, Switzerland, Jul. 2013.
- International Federation of Automatic Control (IFAC) World Congress, Milan, Italy, Aug. 2011.
- Festival Della Scienza, Genoa, Italy, Oct. 2009.
- Researchers‘ Night (Nacht der Forschung), Zurich, Switzerland, Sep. 2009.
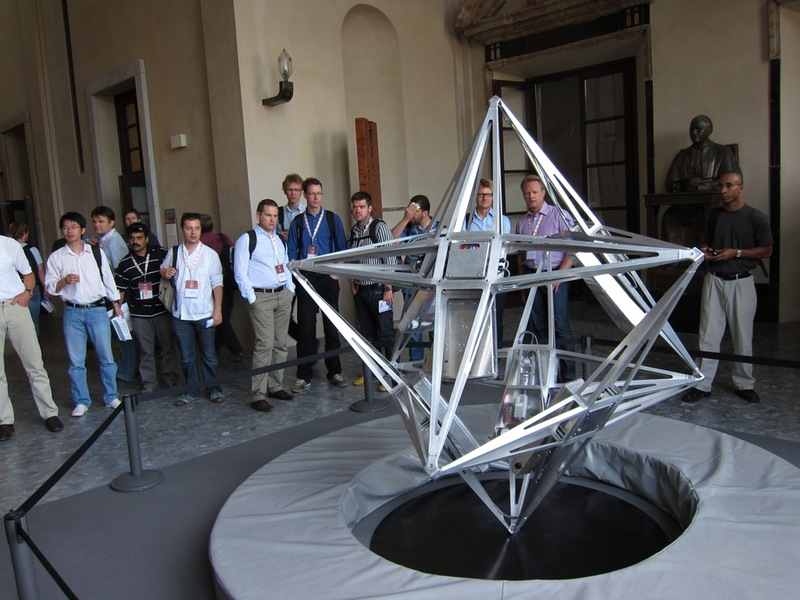
The Balancing Cube during the 2011 World Congress of the International Federation of Automatic Control (IFAC).
Popular science articles
We have published about our research in popular science articles (in German):
- S. Trimpe, Lernende Roboter, Jahrbuch der Max-Planck-Gesellschaft, May 2015.
- S. Trimpe, Wenn es was zu sagen gibt, Bild der Wissenschaft, Sonderbeilage, S. 20-23, Nov. 2014. (This article won the 2014 Klaus Tschira Award for achievements in public understanding of science.)
For scientific publications, please see "Publications" tab.
Lab demos
We regularly present our research in live demonstrations to visitors from academia, media, and industry (e.g. Daimler, BMW, Bosch).
Our research is mainly funded by the Max Planck Society, the German Research Foundation (DFG), the Max Planck ETH Center for Learning Systems, and industry partners.
![]()
![]()

Collaborators
We are fortunate to be working with great colleagues and researchers at the Max Planck Institute (MPI) for Intelligent Systems, Tübingen, as well as from other international research institutions.
Collaborators at MPI Tübingen
- Jeannette Bohg, Autonomous Motion Department
- Felix Grimminger, Autonomous Motion Department
- Philipp Hennig, Probabilistic Numerics Group
- Ludovic Righetti, Autonomous Motion Department
- Stefan Schaal, Autonomous Motion Department
External collaborators
- Jonas Buchli, Professor, ETH Zurich
- Felix Berkenkamp, PhD student, ETH Zurich
- Marco C. Campi, Professor, University of Brescia
- Andreas Krause, Professor, ETH Zurich
- Michael Mühlebach, PhD student, ETH Zurich
- Matthias A. Müller, Lecturer and Postdoctoral Researcher, University of Stuttgart
- Thomas Seel, Postdoctoral Researcher, TU Berlin
- Duy Nguyen-Tuong, Researcher, Bosch Corporate Research, Renningen
- Marco Zimmerling, Research Group Leader, TU Dresden
Alumni
Former members of our group.
- Anna Deichler (Master internship, 2017), now: TU Delft
- Caroline Handel (Master thesis, 2017)
- Andrea Bajcsy (Internship, 2016), now: PhD student at UC Berkeley
- Harsoveet Singh (Master thesis, 2016)
- Cédric de Crousaz (Master thesis, 2016), now: Associate Development Engineer at GoPro
- Simon Ebner (Master thesis, 2016), now: CTO and co-founder Advertima
- Alonso Marco Valle (Master thesis, 2015), now: PhD student with us
- Andreas Dörr (Diploma thesis, 2015), now: PhD student with us and Bosch Renningen
- Holger Kaden (Diploma thesis, 2014)









Collaborators
We are fortunate to be working with great colleagues and researchers at the Max Planck Institute (MPI) for Intelligent Systems, Tübingen, as well as from other international research institutions.
Collaborators at MPI Tübingen
- Jeannette Bohg, Autonomous Motion Department
- Felix Grimminger, Autonomous Motion Department
- Philipp Hennig, Probabilistic Numerics Group
- Ludovic Righetti, Autonomous Motion Department
- Stefan Schaal, Autonomous Motion Department
External collaborators
- Jonas Buchli, Professor, ETH Zurich
- Felix Berkenkamp, PhD student, ETH Zurich
- Marco C. Campi, Professor, University of Brescia
- Andreas Krause, Professor, ETH Zurich
- Michael Mühlebach, PhD student, ETH Zurich
- Matthias A. Müller, Lecturer and Postdoctoral Researcher, University of Stuttgart
- Thomas Seel, Postdoctoral Researcher, TU Berlin
- Duy Nguyen-Tuong, Researcher, Bosch Corporate Research, Renningen
- Marco Zimmerling, Research Group Leader, TU Dresden
Alumni
Former members of our group.
- Anna Deichler (Master internship, 2017), now: TU Delft
- Caroline Handel (Master thesis, 2017)
- Andrea Bajcsy (Internship, 2016), now: PhD student at UC Berkeley
- Harsoveet Singh (Master thesis, 2016)
- Cédric de Crousaz (Master thesis, 2016), now: Associate Development Engineer at GoPro
- Simon Ebner (Master thesis, 2016), now: CTO and co-founder Advertima
- Alonso Marco Valle (Master thesis, 2015), now: PhD student with us
- Andreas Dörr (Diploma thesis, 2015), now: PhD student with us and Bosch Renningen
- Holger Kaden (Diploma thesis, 2014)
2018
Doerr, A., Daniel, C., Schiegg, M., Nguyen-Tuong, D., Schaal, S., Toussaint, M., Trimpe, S.
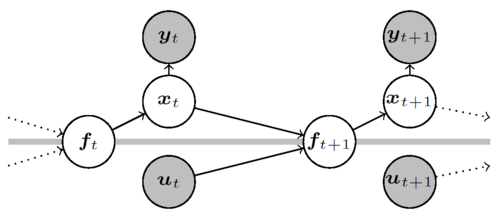
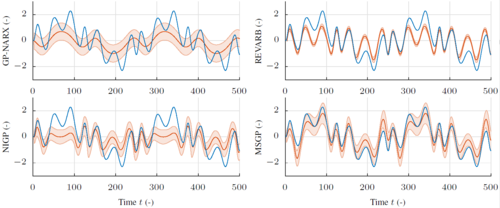
Probabilistic Recurrent State-Space Models
In Proceedings of the International Conference on Machine Learning (ICML), International Conference on Machine Learning (ICML), July 2018 (inproceedings)
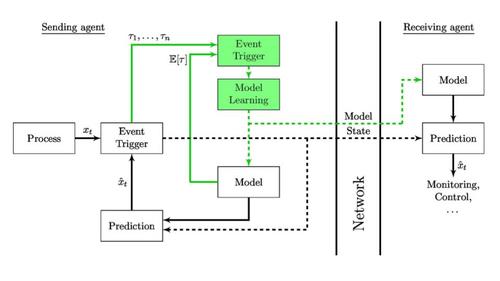
Solowjow, F., Baumann, D., Garcke, J., Trimpe, S.
Event-triggered Learning for Resource-efficient Networked Control
In Proceedings of the American Control Conference (ACC), pages: 6506 - 6512, American Control Conference, June 2018 (inproceedings)

Muehlebach, M., Trimpe, S.
Distributed Event-Based State Estimation for Networked Systems: An LMI Approach
IEEE Transactions on Automatic Control, 63(1):269-276, January 2018 (article)
2017
Doerr, A., Daniel, C., Nguyen-Tuong, D., Marco, A., Schaal, S., Toussaint, M., Trimpe, S.
Optimizing Long-term Predictions for Model-based Policy Search
Proceedings of 1st Annual Conference on Robot Learning (CoRL), 78, pages: 227-238, (Editors: Sergey Levine and Vincent Vanhoucke and Ken Goldberg), 1st Annual Conference on Robot Learning, November 2017 (conference)
Marco, A., Hennig, P., Schaal, S., Trimpe, S.
On the Design of LQR Kernels for Efficient Controller Learning
Proceedings of the 56th IEEE Annual Conference on Decision and Control (CDC), pages: 5193-5200, IEEE, IEEE Conference on Decision and Control, December 2017 (conference)
Marco, A., Berkenkamp, F., Hennig, P., Schoellig, A. P., Krause, A., Schaal, S., Trimpe, S.
Virtual vs. Real: Trading Off Simulations and Physical Experiments in Reinforcement Learning with Bayesian Optimization
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 1557-1563, IEEE, Piscataway, NJ, USA, May 2017 (inproceedings)
Doerr, A., Nguyen-Tuong, D., Marco, A., Schaal, S., Trimpe, S.
Model-Based Policy Search for Automatic Tuning of Multivariate PID Controllers
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 5295-5301, IEEE, Piscataway, NJ, USA, IEEE International Conference on Robotics and Automation (ICRA), May 2017 (inproceedings)
Trimpe, S.
Event-based State Estimation: An Emulation-based Approach
IET Control Theory & Applications, 11(11):1684-1693, July 2017 (article)
2016
Wüthrich, M., Trimpe, S., Garcia Cifuentes, C., Kappler, D., Schaal, S.
A New Perspective and Extension of the Gaussian Filter
The International Journal of Robotics Research, 35(14):1731-1749, December 2016 (article)
Trimpe, S.
Predictive and Self Triggering for Event-based State Estimation
In Proceedings of the 55th IEEE Conference on Decision and Control (CDC), pages: 3098-3105, Las Vegas, NV, USA, December 2016 (inproceedings)
Laidig, D., Trimpe, S., Seel, T.
Event-based Sampling for Reducing Communication Load in Realtime Human Motion Analysis by Wireless Inertial Sensor Networks
Current Directions in Biomedical Engineering, 2(1):711-714, De Gruyter, 2016 (article)
Ebner, S., Trimpe, S.
Communication Rate Analysis for Event-based State Estimation
In Proceedings of the 13th International Workshop on Discrete Event Systems, May 2016 (inproceedings)
Ebner, S., Trimpe, S.
Supplemental material for ’Communication Rate Analysis for Event-based State Estimation’
Max Planck Institute for Intelligent Systems, January 2016 (techreport)
Marco, A., Hennig, P., Bohg, J., Schaal, S., Trimpe, S.
Automatic LQR Tuning Based on Gaussian Process Global Optimization
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), pages: 270-277, IEEE, IEEE International Conference on Robotics and Automation, May 2016 (inproceedings)
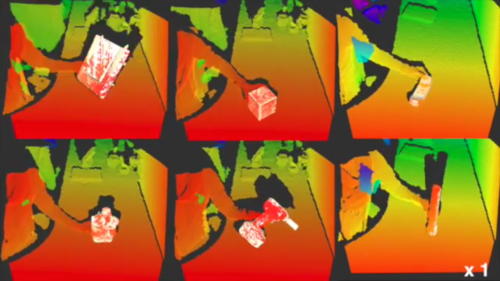
Issac, J., Wüthrich, M., Garcia Cifuentes, C., Bohg, J., Trimpe, S., Schaal, S.
Depth-based Object Tracking Using a Robust Gaussian Filter
In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA) 2016, IEEE, IEEE International Conference on Robotics and Automation, May 2016 (inproceedings)
Wüthrich, M., Garcia Cifuentes, C., Trimpe, S., Meier, F., Bohg, J., Issac, J., Schaal, S.
Robust Gaussian Filtering using a Pseudo Measurement
In Proceedings of the American Control Conference (ACC), Boston, MA, USA, July 2016 (inproceedings)
2015
Trimpe, S.
Distributed Event-based State Estimation
Max Planck Institute for Intelligent Systems, November 2015 (techreport)
Doerr, A.
Policy Search for Imitation Learning
University of Stuttgart, January 2015 (thesis)
Marco, A.
Gaussian Process Optimization for Self-Tuning Control
Polytechnic University of Catalonia (BarcelonaTech), October 2015 (mastersthesis)
Doerr, A.
Adaptive and Learning Concepts in Hydraulic Force Control
University of Stuttgart, September 2015 (mastersthesis)
Marco, A., Hennig, P., Bohg, J., Schaal, S., Trimpe, S.
Automatic LQR Tuning Based on Gaussian Process Optimization: Early Experimental Results
Machine Learning in Planning and Control of Robot Motion Workshop at the IEEE/RSJ International Conference on Intelligent Robots and Systems (iROS), pages: , , Machine Learning in Planning and Control of Robot Motion Workshop, October 2015 (conference)
Doerr, A., Ratliff, N., Bohg, J., Toussaint, M., Schaal, S.
Direct Loss Minimization Inverse Optimal Control
In Proceedings of Robotics: Science and Systems, Rome, Italy, Robotics: Science and Systems XI, July 2015 (inproceedings)
Trimpe, S.
Lernende Roboter
In Jahrbuch der Max-Planck-Gesellschaft, Max Planck Society, May 2015, (popular science article in German) (inbook)
Trimpe, S., Campi, M.
On the Choice of the Event Trigger in Event-based Estimation
In Proceeding of the First International Conference on Event-based Control, Communication, and Signal Processing, June 2015 (inproceedings)
Muehlebach, M., Trimpe, S.
Guaranteed H2 Performance in Distributed Event-Based State Estimation
In Proceeding of the First International Conference on Event-based Control, Communication, and Signal Processing, June 2015 (inproceedings)
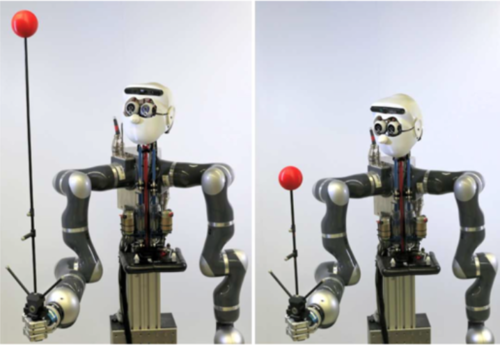
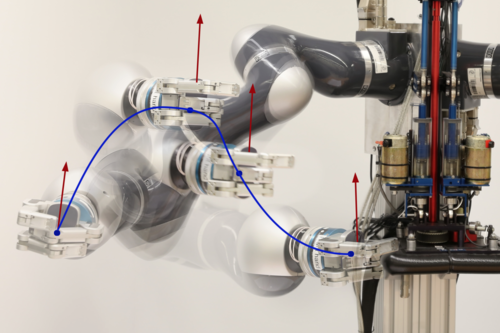
Trimpe, S., Buchli, J.
Event-based Estimation and Control for Remote Robot Operation with Reduced Communication
In Proceedings of the IEEE International Conference on Robotics and Automation, May 2015 (inproceedings)
Muehlebach, M., Trimpe, S.
LMI-Based Synthesis for Distributed Event-Based State Estimation
In Proceedings of the American Control Conference, July 2015 (inproceedings)
Wüthrich, M., Trimpe, S., Kappler, D., Schaal, S.
A New Perspective and Extension of the Gaussian Filter
In Robotics: Science and Systems, 2015 (inproceedings)
2014
Trimpe, S.
Wenn es was zu sagen gibt
Bild der Wissenschaft, pages: 20-23, November 2014, (popular science article in German) (article)
Trimpe, S., Millane, A., Doessegger, S., D’Andrea, R.
A Self-Tuning LQR Approach Demonstrated on an Inverted Pendulum
In Proceedings of the 19th IFAC World Congress, Cape Town, South Africa, 2014 (inproceedings)
Trimpe, S., D’Andrea, R.
A Limiting Property of the Matrix Exponential
IEEE Transactions on Automatic Control, 59(4):1105-1110, 2014 (article)
Trimpe, S., D’Andrea, R.
Event-Based State Estimation With Variance-Based Triggering
IEEE Transactions on Automatic Control, 59(12):3266-3281, 2014 (article)
Trimpe, S.
Stability Analysis of Distributed Event-Based State Estimation
In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, 2014 (inproceedings)
2013
Trimpe, S.
Distributed and Event-based State Estimation and Control
ETH Zurich, 2013 (phdthesis)
2012
Trimpe, S., D’Andrea, R.
Event-based State Estimation with Variance-Based Triggering
In Proceedings of the 51st IEEE Conference on Decision and Control, 2012 (inproceedings)
Trimpe, S.
Event-based State Estimation with Switching Static-gain Observers
In Proceedings of the 3rd IFAC Workshop on Distributed Estimation and Control in Networked Systems, 2012 (inproceedings)
Trimpe, S., D’Andrea, R.
The Balancing Cube: A Dynamic Sculpture as Test Bed for Distributed Estimation and Control
IEEE Control Systems Magazine, 32(6):48-75, December 2012 (article)
2011
Trimpe, S., D’Andrea, R.
Reduced Communication State Estimation for Control of an Unstable Networked Control System
In Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, 2011 (inproceedings)
Trimpe, S., D’Andrea, R.
An Experimental Demonstration of a Distributed and Event-based State Estimation Algorithm
In Proceedings of the 18th IFAC World Congress, 2011 (inproceedings)
2010
Trimpe, S., D’Andrea, R.
Accelerometer-based Tilt Estimation of a Rigid Body with only Rotational Degrees of Freedom
In Proceedings of the IEEE International Conference on Robotics and Automation, 2010 (inproceedings)
2009
Trimpe, S., D’Andrea, R.
A Limiting Property of the Matrix Exponential with Application to Multi-loop Control
In Proceedings of the Joint 48th IEEE Conference on Decision (CDC) and Control and 28th Chinese Control Conference, 2009 (inproceedings)
2007
Kwiatkowski, A., Trimpe, S., Werner, H.
Less Conservative Polytopic LPV Models for Charge Control by Combining Parameter Set Mapping and Set Intersection
In Proceedings of the 46th IEEE Conference on Decision and Control, 2007 (inproceedings)
Gaussian Filtering as Variational Inference
Decision making requires knowledge of some variables of interest. In the vast majority of real-world problems, these variables are latent, i.e. they cannot be observed directly and must be inferred from available measurements. To maintain an up-to-date distribution over the latent variables, past beliefs have to ...Manuel Wüthrich Sebastian Trimpe Cristina Garcia Cifuentes Jan Issac Daniel Kappler Franzi Meier Jeannette Bohg Stefan Schaal